
Xe tự hành là một phương tiện với khả năng làm việc độc lập không có sự kiểm soát hoặc can thiệp trực tiếp của con người. Cùng Việt- Flycam tìm hiểu về xây dựng bản đồ độ phân giải 3D cho xe tự hành bằng velodyne qua bài viết sau đây.
Tìm hiểu về xe tự hành
Xe tự hành là một phương tiện với khả năng làm việc độc lập không có sự kiểm soát hoặc can thiệp trực tiếp của con người. Đây đang là hướng đi mới, một xu thế của nền sản xuất ô tô đang dần hoàn thiện và phát triển hiện nay vì vậy việc hình thành các khái niệm về xe tự hành cũng như bước đầu xây dựng được bản đồ số trên xe đóng vai trò hết sức quan trọng tạo ra những cơ sở cần thiết trong quá trình vận hành xe tự hành.
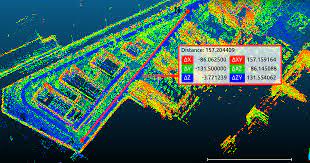
Với mục đích chủ động trong việc lập bản đồ số, bài viết đã trình bày một phương pháp tạo các đám mây ảo bằng thuật toán Normal Distribution Transform ( NDT) với dữ liệu thu được từ Velodyne. Kết quả trong bài viết đóng vai trò trong việc nghiên cứu, phát triển và tích hợp với hệ thống xe tự hành tại Việt Nam
Ý nghĩa của xe tự hành
Khi xe tự hành được phát triển và ứng dụng rộng rãi thì giá trị nó mang lại sẽ tác động mạnh mẽ lên đời sống con người . Trước tiên, xe tự hành sẽ đóng vai trò tích cực trong việc giảm thiểu các tai nạn giao thông vì sự bất cẩn của người điều khiển phương tiện. Đồng thời, nó cũng giúp giảm thiểu tắc nghẽn giao thông khi mà những xe tự hành tham gia giao thông sẽ cùng chia sẻ các dữ liệu với nhau để hình thành ra một cơ sở dữ liệu chung cho việc quản lý và tổ chức giao thông.
Với sự phát triển của xe tự hành thì việc điều khiển phương tiện tham gia giao thông sẽ trở nên đơn giản và thoải mái hơn cho người lái. Ngoài ra, xe tự hành được trang bị rất nhiều loại cảm biến khác nhau và ngoài chức năng dành để di chuyển chúng cũng có
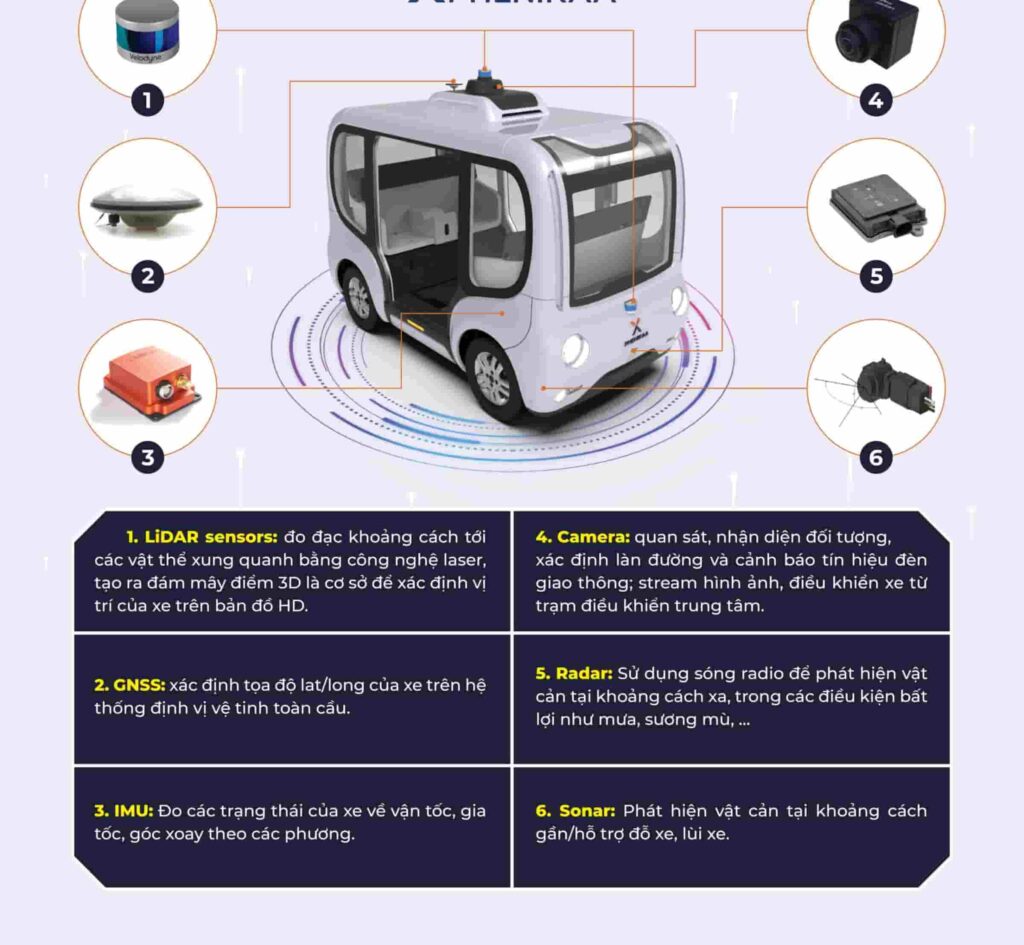
Phương án xây dựng bản đồ độ phân giải 3D cho xe tự hành bằng velodyme – Công nghệ 3D mapping
Thể giải quyết các vấn đề về quan sát, vẽ bản đồ và theo dõi những biến đổi của môi trường. Trong lĩnh vực phát triển xe tự hành, vị trí địa lý của phương tiện và môi trường xung quanh đòi hỏi độ chính xác cao cũng là vấn đề đặt ra đối với một số loại xe tự lái .
Mặc dù, thông tin vị trí địa lý từ GPS của xe có thể đảm bảo hỗ trợ tốt cho việc điều khiển phương tiện, tuy nhiên độ chính xác của nó không đủ để điều hướng xe tự lái. Thay vào đó, độ chính xác của GPS cần được tính toán
Và thực hiện được các phép đo bằng những dữ liệu và hình ảnh dựa trên bản đồ số. Đây cũng là một cách giúp xe tự hành có thể tự xác định được vị trí của nó trong các bản đồ
Một cách chuẩn xác nhất. Velodyne đặt trên nóc xe sẽ là giải pháp tối ưu cho khả năng hoạt động của xe tự hành. Quá trình quét của velodyne sẽ cung cấp các đám mây điểm chính xác với phạm vi rộng lớn theo thời gian thực tuy nhiên vẫn còn thưa thớt và không đồng nhất. Các đám mây điểm thu được bởi Velodyne ban đầu thu được trong hệ toạ độ cục bộ
Có thể dịch chuyển theo vị trí của gps thực tế đo được. Từ đó xe tự hành sẽ tự định vị vị trí của mình trong không gian một cách chính xác dựa trên hình ảnh phát ra từ kết quả quét của Lidar Velodyne. Có khá nhiều phần mềm được dùng cho việc lập bản đồ số 3D bao gồm: Generalized – Iterative Closest Point ( GICP) , Iterative Closest Point ( ICP) , Normal Distribution Transform ( NDT) v.v. .. Tuy nhiên, trong phạm vi bài báo này, với điều kiện có một số hãng lớn tham gia, bài viết đã lựa chọn và sử dụng thuật toán NDT để tạo ra mô hình Đám mây điểm chi tiết và môi trường xung quanh trên xe Tự hành.
Xem thêm: 3D mapping – Bay quét thành lập bản đồ 3D chi tiết
Giải pháp máy bay không người lái Việt-Flycam
Hotline: 0917.111.392 - 0869.191.996
Địa chỉ: Tòa nhà D8, Đại học Bách Khoa Hà Nội, Trần Đại Nghĩa, Hà Nội, Việt Nam
Email: Vietflycam1102@gmail.com
Youtube: https://www.youtube.com/channel/UCgRFxKxd2vt5gn_mbS1sJgA