
Khảo sát địa hình bằng flycam RTK giúp cho công việc thu thập dữ liệu khảo sát được chính xác và nhanh chóng hơn. Những hiệu quả đo đạc đó đã giúp cho ứng dụng flycam được phát triển và phổ biến hơn.
Mục lục
Máy bay không người lái RTK hoạt động như thế nào?
Được trang bị máy bay không người lái RTK, máy thu GNSS RTK. Thu thập dữ liệu từ vệ tinh và trạm cơ sở (mặt đất) để cải thiện độ chính xác về vị trí của hình ảnh thời gian thực trong chuyến bay.
Bản thân dữ liệu vệ tinh dù sao cũng là dữ liệu vệ tinh dễ bị lỗi do độ trễ tầng đối lưu, v.v. và cung cấp độ chính xác lên tới khoảng 1 mét.
Thu thập dữ liệu trạm mặt đất để sửa lỗi tín hiệu vệ tinh và mang lại độ chính xác của vị trí cho phạm vi centimet.
Với công nghệ Drone RTK, tín hiệu từ trạm gốc GNSS được kết nối liên tục với máy bay thông qua trạm gốc của máy bay không người lái trong khu vực bay chụp.
Khi máy bay không người lái hạ cánh và tất cả các tín hiệu không đổi, hình ảnh có tọa độ tuyệt đối để xử lý hậu kỳ để tạo bản đồ.
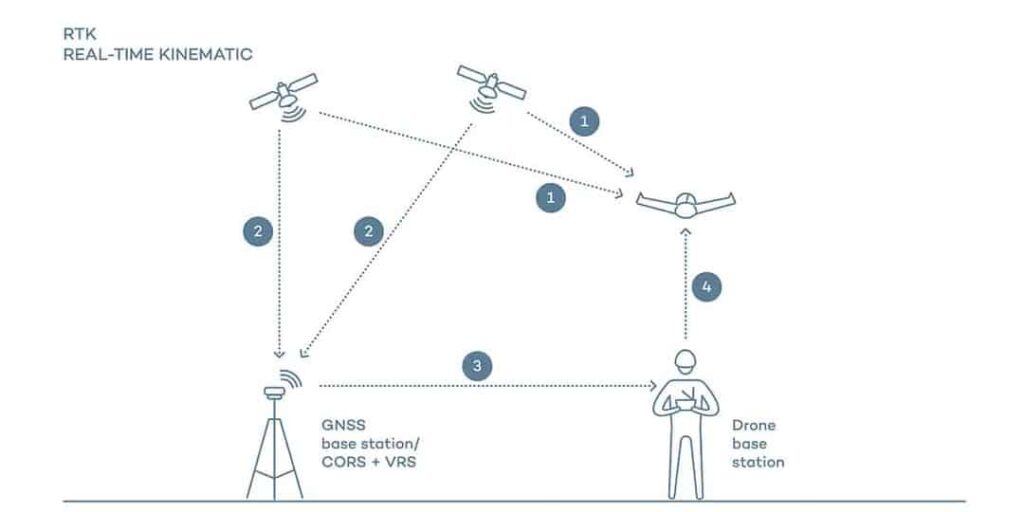
4 đường truyền tín hiệu Drone RTK
- Truyền tín hiệu giữa vệ tinh và máy bay không người lái
- Khả năng kết nối giữa vệ tinh và trạm gốc Mạng GNSS hoặc CORS (hỗ trợ VRS qua thiết bị di động)
- Đường dây giữa trạm GNSS hoặc CORS/VRS và trạm Base Drone
- Truyền tín hiệu giữa trạm Base Drone và Drone.
Công nghệ Drone RTK rất tốt khi đường truyền tín hiệu được kết nối liên tục. Tuy nhiên, trong điều kiện thực tế, có một số vấn đề như vật cản chặn tín hiệu. Hoặc máy bay bay ra khỏi vùng phủ sóng của tín hiệu. Tại thời điểm này, tín hiệu bị gián đoạn và hình ảnh được chụp sẽ mất đi độ chính xác như mong đợi. Trong trường hợp tốt nhất, tín hiệu giữa GNSS cơ sở và máy bay được kết nối liên tục và độ chính xác giống như phương pháp PPK.

Các phương pháp bay chụp ảnh
Đo động thời gian thực RTK
Phương pháp đo động thời gian thực RTK là kỹ thuật được sử dụng để nâng cao độ chính xác của dữ liệu vị trí thu được từ hệ thống định vị dựa trên vệ tinh. Dựa trên một trạm tham chiếu duy nhất hoặc trạm ảo nội suy để sửa thành vị trí tâm ảnh khi bay.
Nói cách khác, RTK là một kỹ thuật hiệu chỉnh giúp cải thiện độ chính xác của GNSS. Ngày nay, khi bay bằng phương pháp Đo lường động thời gian thực (RTK), có hai tùy chọn: sử dụng các trạm cơ sở của công ty hoặc kết nối các trạm Cors và Base 3G.
Ưu điểm của phương pháp đo RTK: Không cần xử lý hậu kỳ GNSS với hiệu chỉnh thời gian thực
Nhược điểm của phương pháp đo RTK
- Xử lý dữ liệu thời gian thực yêu cầu trạm gốc, thiết bị đặc biệt và kết nối ổn định
- Độ chính xác của kết quả phụ thuộc nhiều vào tín hiệu vệ tinh, tín hiệu mạng kết nối máy bay với bộ điều khiển và điều kiện địa hình.

Đo động xử lý sau PPK
Một giải pháp thay thế cho RTK là xử lý PPK. Kỹ thuật đo động này thu thập và tải dữ liệu UAV, sau đó hiệu chỉnh độ chính xác của vị trí trung tâm hình ảnh. Dữ liệu được sửa đổi trong trình quản lý dữ liệu chuyến bay và được xử lý trên đám mây.
Ưu điểm:
- Kết quả độ chính xác ít phụ thuộc vào yếu tố địa hình do thu tín hiệu độc lập giữa máy bay và máy thu tĩnh (GNSS tần số kép).
- Tăng tính linh hoạt của chuyến bay vì không cần kết nối để thu thập dữ liệu
Nhược điểm
- Xử lý dữ liệu vị trí sau chuyến bay cần có thời gian
- Đầu tư vào nhiều máy thu GNSS trên mặt đất hơn để sửa dữ liệu chuyến bay thu được
Trong hai phương pháp trên, mỗi phương pháp đều có ưu điểm và nhược điểm, việc áp dụng phụ thuộc vào điều kiện địa hình và các yếu tố phục vụ để nâng cao hiệu quả công việc.
Có thể bạn quan tâm: Khảo sát hiện trạng bằng flycam – Bay quét 2D, 3D địa hình
Giải pháp máy bay không người lái Việt-Flycam
Hotline: 0917.111.392 - 0869.191.996
Địa chỉ: Tòa nhà D8, Đại học Bách Khoa Hà Nội, Trần Đại Nghĩa, Hà Nội, Việt Nam
Email: Vietflycam1102@gmail.com
Youtube: https://www.youtube.com/channel/UCgRFxKxd2vt5gn_mbS1sJgA